記者蔡琛儀/台北報導
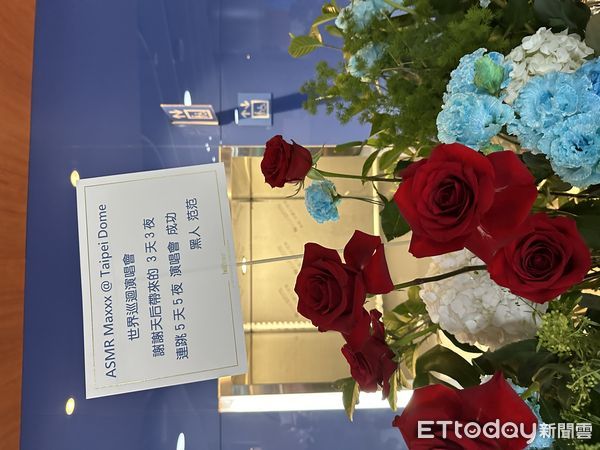
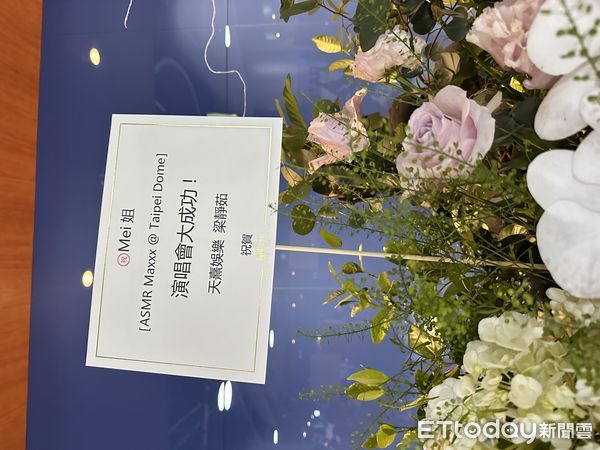
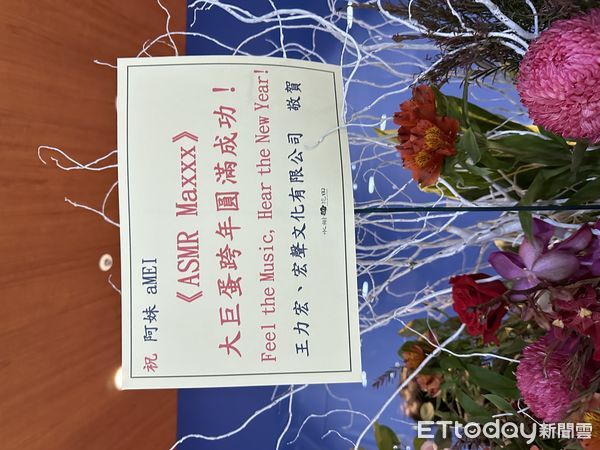
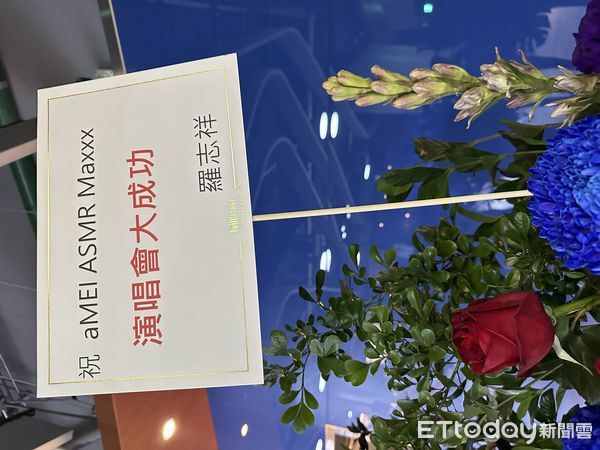
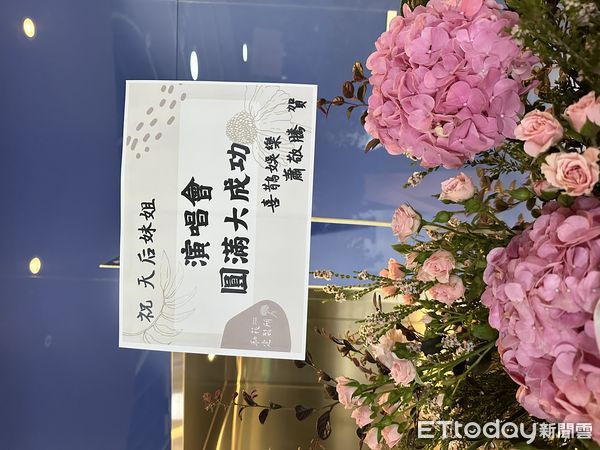
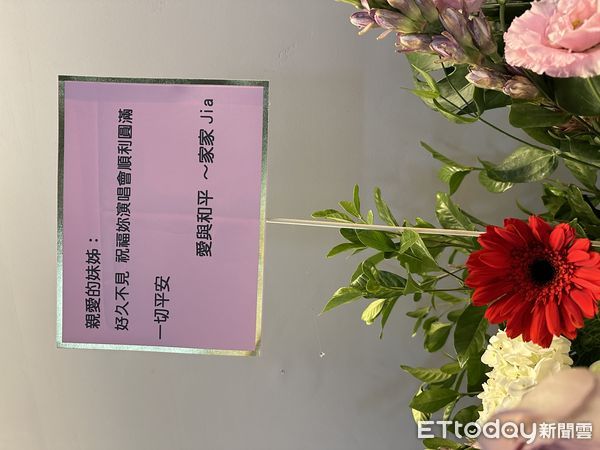
天後張惠妹(阿妹)今(21日)起在台北大巨蛋舉辦「ASMR Maxxx」台北大巨蛋演唱會連炸5場,在圈內人緣極佳的她,後台花籃也都是天王天後等級,包括上週邀請她合唱的周傑倫(周董)、江蕙、小S、羅志祥、蕭敬騰、林俊傑、孫燕姿、陶喆、蕭亞軒等。

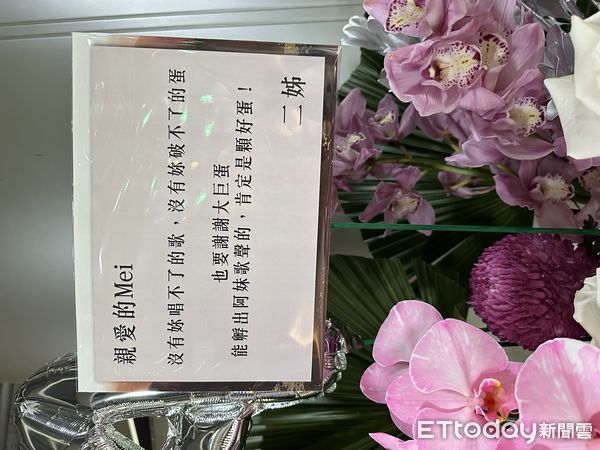
周董上週向阿妹喊話說接下來要由她「接棒」在大巨蛋演出,當時阿妹還不懂「接棒」的意思,周董今在花牌上幽默寫:「接棒…..就是這個意思啊。」江蕙則寫:「沒有妳唱不了的歌,沒有妳破不了的蛋,也要謝謝大巨蛋,能孵出阿妹歌聲的,肯定是顆好蛋。」
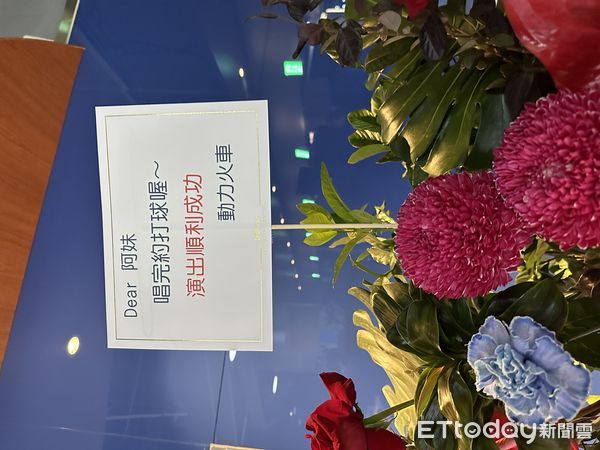
向來備受網友期待的小S花牌,這次也不讓人失望,依然用超大字體署名「國際巨星小S」以及小到不行的「素人老公Mike」,並寫:「妹~~妳在天花板,有看見倫(指周傑倫)嗎?」而林俊傑則說:「這次應該可以儘管跳,跳個三天三夜,儘管震了吧!」動力火車還直接開約:「唱玩約打球喔~」林宥嘉寫:「人超好的妹姐,謝謝妳總是給我鼓勵。祝妳破蛋順利!祝各位新年快樂!」








標題:直擊/張惠妹開唱「花籃全是大咖巨星」 周傑倫、小S超幽默!
聲明: 本文版權屬原作者。轉載內容僅供資訊傳遞,不涉及任何投資建議。如有侵權,請立即告知,我們將儘速處理。感謝您的理解。