


展開全文



穿梭其中
數百年匠心妙藝
幾何美學同無垠歲月共冶一爐
靈動线條勾勒精絕匠藝
制表技藝構築紛繁時計
於時光中成就腕間非凡之姿

江詩丹頓的時計作品
並非只是各種機械部件的排列組合
而是始於一張設計草圖的匠藝之旅
隨着腕表的幾何輪廓被逐漸勾勒成形
並以卓越的制表技藝打磨出
由造型、色彩與紋理交匯而成的藝術之境

基於對精妙數字的縝密思考
以及對幾何美學的不懈探索
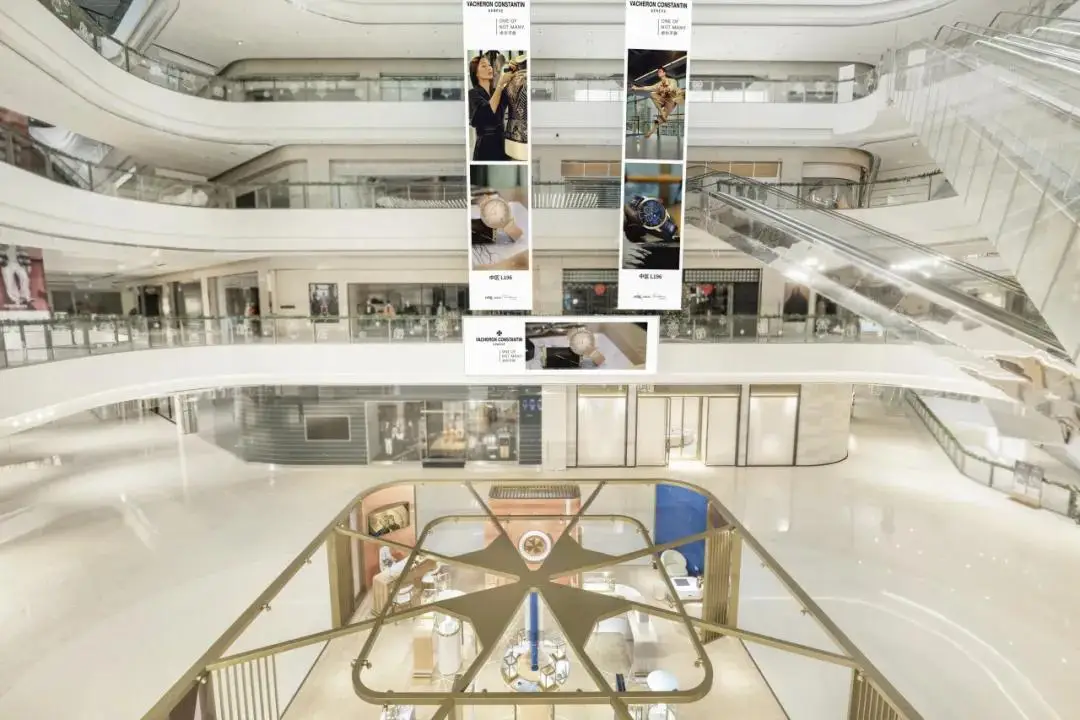
品牌傾力打造最新概念的全國巡展
將“匠藝幾何”的年度主題與展廳設計相糅合
爲鐘表愛好者精心構建別具一格的體驗空間
以一座創意制表工坊精彩的演示
“匠藝幾何”的澎湃創造力
精巧絕倫的制表匠藝
優雅交融於幾何空間
時計傑作與典藏臻作陳設其中
精妙詮釋江詩丹頓的美學意蕴
讓傳承匠藝與不竭靈感,在此盡顯

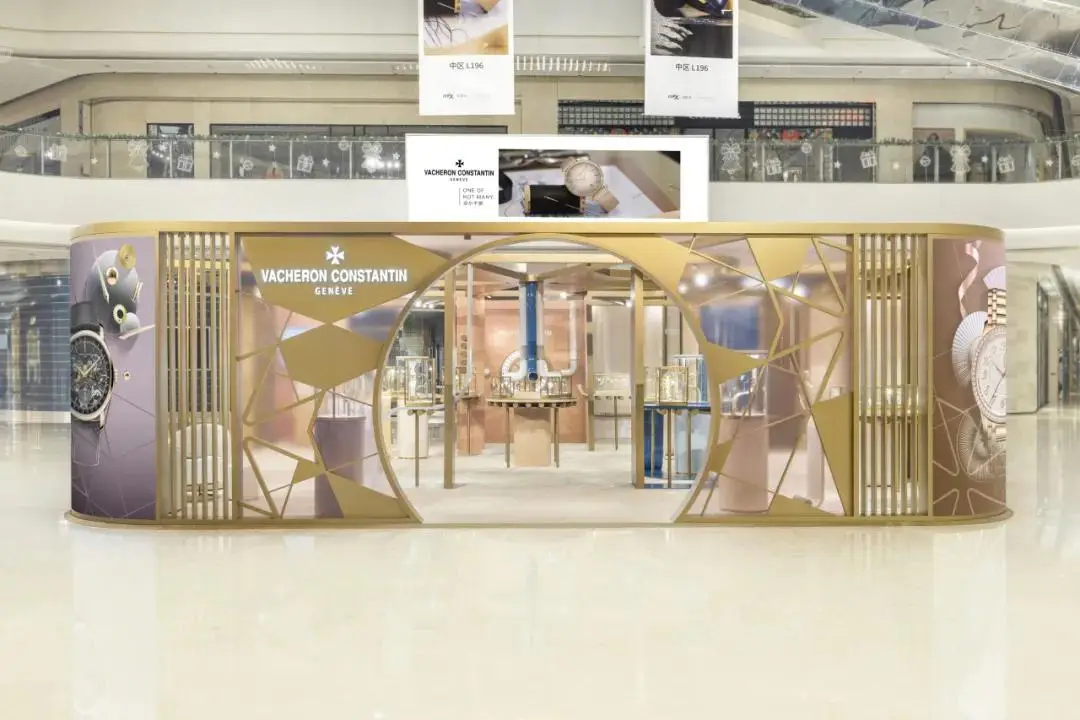
透過寸鏡樣式的拱門
讓視线盡情延伸
大型中央裝置立於核心區域
由品牌專爲本次巡展特別打造
以藝術化視角模擬制表工坊的工作流程
將制表大師的充沛巧思具象成形
目光隨幾何輪廓遊走
凝萃時間的金芒進駐視野
層層光華向上蔓延,直抵穹頂
品牌標識馬耳他十字置於其中
把賓客籠罩在幾何美學的奇觀下

匠人工筆,一點一线
在裝置中展現得淋漓盡致
採擷靈感、匯聚創意、組裝成體
精妙呈現品牌高級制表精妙匠藝
爲品位鑑賞家奉上一場靈動盛宴

凝注展廳中央
2024年“鐘表與奇跡”日內瓦高級鐘表展
發布的臻品傑作在此矚目呈現
與你共鑑腕間雋永之美

Patrimony傳承系列月相逆跳日歷腕表
古銀色表盤搭配全新橄欖綠色表帶
以簡馭繁,禮贊純粹之美

Égérie伊靈女神系列綺藝蕾絲腕表
手工雕刻、琺琅工藝、寶石鑲嵌
成就深沉而內斂的優雅韻致

Traditionnelle傳襲系列陀飛輪計時腕表
超卓復雜功能與高級制表傳統
於分秒之內,詮釋腕間風華


探索Overseas縱橫四海系列展區
以濃鬱美感喚醒全身感官
Overseas縱橫四海系列計時腕表
深綠色表盤亦如蒼綠層林
粉紅金腕表傾瀉潤澤光芒
與澎湃機芯致敬探索精神

Overseas縱橫四海系列自動上鏈腕表
深邃藍調表盤詮釋運動之趣
精金表殼捕捉旅程中的光輝瞬間
穿戴間,出衆魅力一覽無余
杏粉表盤將優雅奧義淋漓詮釋
演繹高級制表的靈動風範

踏入Égérie伊靈女神系列展區
指針、時標、小表盤等經典元素
巧妙構築一隅靈動空間
呈現經典偏心表盤美學設計
演繹高級鐘表與高定時裝的浪漫邂逅

靈動线條引人遊歷其間
恍若走進機械美學的小型展覽
5款Égérie伊靈女神系列腕表
分秒詮釋雋永優雅的腕間遐想


轉身回溯極簡制表美學
5款Patrimony傳承系列臻作
以經典之作跨越時間維度
傳承工藝魅力與文化底蕴

Patrimony傳承系列手動上鏈腕表
超薄機芯承襲內斂格調
方寸之間盡顯優雅風範
將精純工藝同至簡之意娓道來

Patrimony傳承系列自動上鏈腕表
至簡設計描摹凝靜之姿
澄澈藍調演繹優雅風姿
舉手投足間流露雋永意趣


步入Traditionnelle傳襲系列展區
以陀飛輪的設計構造爲靈感
拆解、合並陀飛輪的各部件
無盡飛旋流轉於細節之間
帶你直觀感受江詩丹頓的機械美感
Traditionnelle傳襲系列陀飛輪腕表
超薄陀飛輪盡顯精湛工藝
深綠色表盤搭配鉑金表殼
以青翠色澤鋪就非凡質感
見證純粹的工藝追求


更多時計臻品靜候鑑賞
2024年“鐘表與奇跡”上海高級鐘表展
發布的Métiers d’Art藝術大師系列
中國十二生肖傳奇之蛇年腕表
爲生肖主題作品开啓新一輪循環
誠篤致敬與中國的深厚情緣

Métiers d’Art藝術大師系列
“致敬中國文化標志”主題作品
以“海水江崖紋”爲設計靈感
以極具衝擊力的設計語言和工藝表達
傳遞中華傳統文化豐富悠久的意涵


腕表盛宴之後
極具特色的留影空間盼你入場
以隨性姿態,定格即興靈感
品牌標識馬耳他十字充做背景
留存這一刻的優雅時光

不止於此處
各位鑑賞家還能在展廳中尋找
品牌標識馬耳他十字的設計元素
通過微信小程序掃描一番
就能解鎖AR互動體驗
點觸之間,趣味捕捉幾何印記


漫步至互動區域「大師工坊」
趣味體驗《時間咒語書》裝置
沉浸式了解江詩丹頓
近270年的豐富歷史
與期間極具代表性的腕表傑作

還有機會近距離溝通制表大師
深入了解專業腕表知識
體驗匠心技藝和尊享服務
感受高級制表的非凡魅力

此外,無法到場的腕表愛好者們
可通過微信小程序线上參與展覽
體驗“匠藝幾何”創意互動遊戲
以不同系列腕表的幾何構造
拼接出充滿匠心藝術的幾何腕表圖案
輸入特殊時刻,獲取對應文案
生成獨一份的專屬海報
方寸寰宇,妙趣橫生
欣然前往幾何之境
沉浸腕間匠藝,共鑑時計臻品
一同探索江詩丹頓的匠藝魅力
江詩丹頓“匠藝幾何”全國巡展
——重慶站
-快閃時間-
12月20日-12月25日
10:00 – 22:00
-活動地址-
重慶市九龍坡區謝家灣正街55號
萬象城一樓中庭
標題:共赴匠藝妙境,探索江詩丹頓高級制表世界
聲明: 本文版權屬原作者。轉載內容僅供資訊傳遞,不涉及任何投資建議。如有侵權,請立即告知,我們將儘速處理。感謝您的理解。


