記者劉宛欣/綜合報導
2024年迎來尾聲,小S在臉書分享徐家三姊妹的合照,包括少露面的素人大姊也一起入鏡,其中最吸睛的還是大S和具俊曄夫婦,開玩笑表示「好啊,你們那麼愛看大S,我就發給你們看,她就是沒化妝臉就發光,我們姐妹倆就是基因奇好」,該貼文也吸引了好友賈永婕在底下留言,身為101董事長的賈永婕不忘宣傳提醒要看跨年煙火。

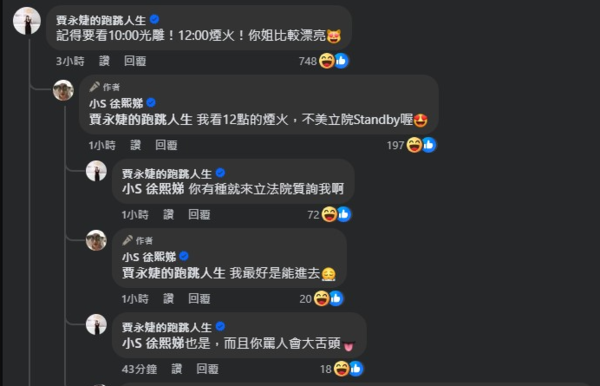
賈永婕留言寫下「記得要看10點光雕!12點煙火!」並且不忘吐槽小S「你姐比較漂亮」,小S則馬上回答表示「我看12點的煙火,不美立院Stand by喔」,開玩笑稱如果101煙火不夠好看,要到立法院,賈永婕也不甘示弱地回擊「擬有種就來立法院質詢我啊」,小S則冷冷表示「我最好是能進去」,得到賈永婕調侃「也是,而且妳罵人會大舌頭」,好友間的互動相當逗趣。
值得一提的是,小S曬出的照片中徐家三代同堂齊聚,除了S媽,還有大小S三姊妹,以及小S的長女Elly,另外還有Makiyo抱著兒子,照片中的大S正如小S所描述,雖然未施脂粉,不過仍精心打扮,氣色極佳、笑容甜美,她的手輕放在老公具俊曄的肩膀上,看得出夫妻倆感情相當甜蜜。
標題:小S放話101煙火不夠美「衝立院質詢賈永婕」! 她笑回:有種來啊
聲明: 本文版權屬原作者。轉載內容僅供資訊傳遞,不涉及任何投資建議。如有侵權,請立即告知,我們將儘速處理。感謝您的理解。


